АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомДругоеЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция
Основные характеристики линейных систем
Обычными линейными системами называются системы, описываемые линейными дифференциальными уравнениями с постоянными коэффициентами. Элемент или система считаются заданными, если построена математическая модель, позволяющая по известному входному сигналу u (t) определить выходную реакцию y (t).
Дифференциальные уравнения
Линейная непрерывная стационарная система описывается линейным дифференциальным уравнением с постоянными коэффициентами:
 a 0 y (n) + a 1 y (n -1) + a 2 y (n -2) +...+ any = b 0 u (m) + b 1 u (m -1) + b 2 u (m -2) +...+ bmu,
a 0 y (n) + a 1 y (n -1) + a 2 y (n -2) +...+ any = b 0 u (m) + b 1 u (m -1) + b 2 u (m -2) +...+ bmu,
где ai, bi – постоянные величины, параметры звена; n, m – целые; n – порядок уравнения (порядок звена).
 Для определения выхода должны быть заданы начальные условия:
Для определения выхода должны быть заданы начальные условия:
y (0) = y 0,0; y (1)(0) = y 1,0;...; y ( n -1)(0) = yn -1,0.
Дифференциальное уравнение может быть записано в операторном виде. Для этого вводят оператор дифференцирования D = d/dt, так что для любой функции f (t): Df = df/dt. С использованием оператора дифференцирования дифференциальное уравнение записывается в виде:
 (a 0 Dn + a 1 Dn -1 +... + an) y (t) = (b 0 Dm + b 1 Dm -1 +... + bm) u (t)
(a 0 Dn + a 1 Dn -1 +... + an) y (t) = (b 0 Dm + b 1 Dm -1 +... + bm) u (t)
или
Q (D) y (t) = P (D) x (t), где Q (D) = a 0 Dn +... + an, P (D) = b 0 Dm +... + bm.
Передаточная функция
Понятие "передаточная функция" связано с использованием преобразования Лапласа. Преобразованием по Лапласу функции f (t) (ее L -образом) называется функция F (p) комплексной переменной p, вычисляемая как интеграл
 F (p) = L { f (t)}=
F (p) = L { f (t)}=  .
.
По заданной F (p) может быть однозначно восстановлена функция f (t), называемая оригиналом (прообразом) F (p), если f (t) = 0 при t < 0: f (t) = L -1{ F (p)}. Существуют специальные таблицы преобразований Лапласа. Отметим несколько свойств:
– линейность

 L { af (t) + bg (t)} = aL { f (t)} + bL { f (t)};
L { af (t) + bg (t)} = aL { f (t)} + bL { f (t)};
– преобразование производной функции
L { df (t)/ dt } = pL { f (t)} – f (0).
Отсюда следует
L { d 2 f (t)/ dt 2} = pL { df (t)/ dt } – f ’(0) =
=p [ pL { f (t)}– f (0)] – f ’(0) = p 2 F (p)– pf (0)– f ’(0).
L { dnf (t)/ dtn } = pnF (p) – pn -1 f (0) – pn -2 f ’(0) –… – pf ( n -2)(0) – f ( n -1)(0).
В частности, при нулевых начальных условиях
L { Dnf (t)} = pnF (p).
Таблица преобразований Лапласа
| Функция | Преобразование | Функция | Преобразование | |
| 1 /p | sin(at) | a/ (p 2 +a 2) | ||
| t | 1 /p 2 | cos(at) | p/ (p 2 +a 2) | |
| tn | n!/pn+ 1 | eat sin(bt) | b/ [(p–a)2 +b 2] | |
| eat | 1 / (p–a) | eat cos(bt) | (p–a) / [(p–a)2 +b 2] |
Пример. Вычислить преобразование Лапласа от функции
f (t) = sinw t.

Пример. Вычислить преобразование Лапласа от функции
f (t) = cosw t.
Применим преобразование Лапласа к обеим частям дифференциального уравнения (2.4) при нулевых начальных условиях:
L { a 0 y (n) + a 1 y (n -1) + a 2 y (n -2) +...+ any } = L { b 0 u (m) + b 1 u (m -1) +...+ bmu },
L { a 0 y (n)}+ L { a 1 y (n -1)} +...+ L { any } = L { b 0 u (m)} +...+ L { bmu },
a 0 L { y (n)}+ a 1 L { y (n -1)} +...+ anL { y } = b 0 L { u (m)} +...+ bmL { u },
a 0 pnY (p)+ a 1 pn- 1 Y (p) +...+ anY (p) = b 0 pmX (p)+...+ bmX (p),
(a 0 pn + a 1 pn- 1 +...+ an) Y (p) = (b 0 pm +...+ bm) X (p),
Q (p)× Y (p) = P (p)× X (p)
Y (p) = G (p)× X (p), где G (p) = P (p)/ Q (p).
Передаточная функция представляет собой отношение преобразований по Лапласу выходной и входной величин, вычисленных при нулевых начальных условиях:


Передаточную функцию легко определить по дифференциальному уравнению. Для этого следует записать его в операторной форме, заменить в полиномах Q (D) и P (D) оператор дифференцирования D на переменную Лапласа p и вычислить передаточную функцию как отношение P (p)/ Q (p).
Чем удобно использование передаточной функции? ПФ – характеристика звена (системы), определяется только его параметрами, не зависит от внешних воздействий, начальных условий. ПФ – компактная форма записи свойств системы, удобна для определения характеристик сложной системы по характеристикам отдельных звеньев. G (p) – дробно-рациональная функция p, с ней можно производить алгебраические операции.
Как, зная G (p), определить выход y (t) по известному входу x (t)?
а) находим (можно по таблице) преобразование Лапласа входного сигнала x (t): X (p) = L { x (t)};
б) определяем преобразование Лапласа выхода: Y (p) = G (p) X (p);
в) находим (можно по таблице) преобразование Лапласа выходного сигнала: y (t) = L -1{ Y (p)}.
Пример. По заданной передаточной функции G (p) = 2/(5 p +3) и входному сигналу x (t) = 2 t определить выходной сигнал y (t).
Пример. Решить дифференциальное уравнение  , используя преобразование Лапласа.
, используя преобразование Лапласа.
Переходная функция
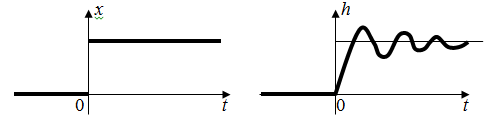
Переходной функцией называется реакция системы на единичное входное воздействие, поданное в нулевой (начальный) момент времени при нулевых начальных условиях.
Поясним физический смысл переходной функции. Переходная функция (переходная характеристика) представляет собой переходный процесс на выходе системы, возникающий при подаче на ее вход скачкообразного воздействия единичной величины. Такое воздействие x (t) называется единичной ступенчатой функцией и обозначается 1[ t ] (рис. 2.1, а):

а б
Рис. 2.1. Единичная ступенчатая (а) и переходная (б) функции
Ступенчатая функция – распространенный вид воздействия в автоматических системах: мгновенное изменение нагрузки генератора, мгновенный поворот вала следящей системы и т. д.
Переходная функция (рисунок 2.1, б) может быть определена экспериментально или теоретически. Эксперимент заключается в воздействии на систему ступенчатого сигнала u (t) = u 0×1[ t ] и фиксации реакции системы y (t). По определению y (t) = h (t)× u 0 Þ h (t) = y (t)/ u 0.
Если система задана дифференциальным уравнением, то для определения h (t) следует решить это уравнение при u (t) =1 и нулевых начальных условиях.
Пример. Определить переходную функцию звена, заданного передаточной функцией G (p)=1/(5 p +3).
Весовая функция
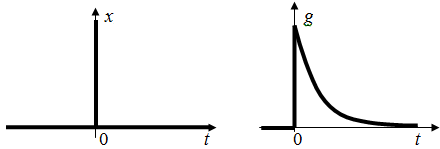
Весовая функция представляет собой реакцию системы на единичную импульсную функцию, поданную на ее вход при нулевых начальных условиях. Единичная импульсная функция (дельта-функция Дирака, рис. 2.2, а) определяется следующим образом:


а б
Рис. 2.2. Единичная импульсная (а) и весовая (б) функции
Импульсная функция также является распространенным видом воздействий (кратковременный удар нагрузки на валу двигателя, кратковременный ток короткого замыкания генератора). В действительности реальные импульсные воздействия конечны по величине и продолжительности. d-функцию можно представить как предел прямоугольного импульса шириной е и высотой 1/ е при е ®0.
Название "весовая" объясняется ролью данной функции в формировании выходного сигнала из входного воздействия.

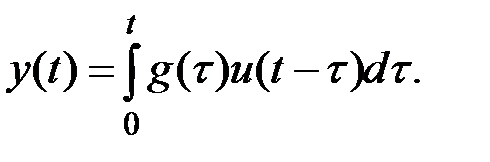
Выходной сигнал в произвольный момент времени t зависит от характера изменения входного сигнала во все предшествующие рассматриваемому моменты t < t, причем выход формируется путем суммирования "взвешенных" значений входа. Вес (т. е. доля в сумме, приходящаяся на момент t) определяется как раз весовой функцией.
Весовую функцию (рис. 2.2, б) можно оценить экспериментально, подав на вход импульсное воздействие и замерив реакцию на выходе. При этом, как уже говорилось, "всплеск" заменяют "прямоугольником". Теоретически g (t) может быть найдена путем решения дифференциального уравнения с правой частью в виде d-функции при нулевых начальных условиях или по передаточной функции G (p) как обратное преобразование Лапласа
 g (t) = L -1{ G (p)}.
g (t) = L -1{ G (p)}.
Отметим связь переходной и весовой характеристик:
 g (t) = d / dt { h (t)}, h (t) = ò g (t) d t.
g (t) = d / dt { h (t)}, h (t) = ò g (t) d t.
Пример. Определить выходной сигнал y (t) по заданному входному сигналу u (t) = 2 t для звена, заданного передаточной функцией G (p) = 1/(5 p +3).
Тест (на 15 мин)
1. Решите дифференциальное уравнение  c начальным условием x (0) = 1.
c начальным условием x (0) = 1.
2. На основе определения понятия «преобразование Лапласа» вычислите образ функции f (t) = t +1.
3. Найдите преобразование Лапласа функции f (t) = t 2/2 + t с помощью таблицы преобразований Лапласа.
4. Пусть g (t) = 1, z (t) = t. Запишите выражение для передаточной функции от g (t) к z (t).
5. На вход звена с передаточной функцией G (p) = p +1 подан сигнал u (t) = t. Нарисуйте график изменения выходного сигнала y (t).
6. Определите переходную функцию звена, заданного передаточной функцией G (p) = 1/(5 p).
7. Определите выходной сигнал y (t) по заданному входному сигналу u (t) = t для звена c передаточной функцией G (p) = 1/(2 p).
Частотные характеристики линейных систем
Частотные характеристики являются одними из важнейших характеристик линейных САУ. Они позволяют определить точность отработки управляющих воздействий; погрешности, обусловленные возмущениями, исследовать устойчивость; оценить быстродействие, полосу пропускания и другие показатели динамических систем. Все частотные характеристики, в той или иной форме, показывают, каким образом система реагирует на гармонические входные воздействия.
Реакция линейной системы на гармоническое входное воздействие имеет вид гармоники той же частоты.
x (t) y (t)
G (p)
a ×sinw t b (w)×sin(w t +j(w)),
b (w) = a ×| G (i w)|, j(w) = arg G (i w)
G (i w) – частотная передаточная функция или комплексная частотная характеристика.
Виды частотных характеристик
1. Амплитудно-частотная характеристика (АЧХ) показывает, как изменяется амплитуда выходного сигнала в зависимости от частоты изменения гармонического входного сигнала.
АЧХ – это зависимость отношения амплитуды выходного сигнала к амплитуде входного гармонического сигнала, рассматриваемая как функция частоты. АЧХ определяется модулем частотной передаточной функции
 A (w)= | G (i w)|.
A (w)= | G (i w)|.

| A (w) |
| A |
| w |
Рис. 2.3. Пример АЧХ
| w |
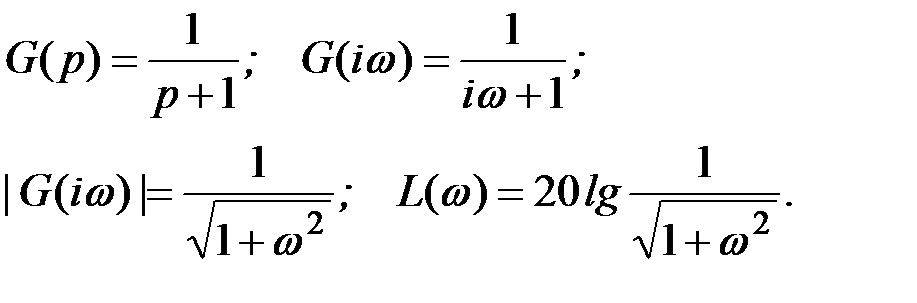
ФЧХ – это зависимость фазового сдвига между выходным и входным гармоническим сигналом от частоты изменения последнего. ФЧХ определяется аргументом частотной передаточной функции
 j(w) = arg G (i w).
j(w) = arg G (i w).
Фазовый сдвиг Dj можно определить через временной сдвиг D t по формуле Dj = w×D t.

| j(w) |
| w |
| j |
| w |
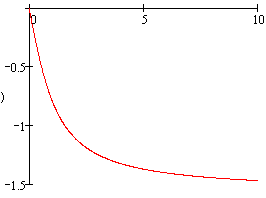
Рис. 2.4. Пример ФЧХ
3. Амплитудно-фазовая частотная характеристика (АФЧХ)
АФЧХ не имеет физического смысла. Она строится на комплексной плоскости и представляет собой геометрическое место точек концов векторов (годограф), соответствующий частотной передаточной функции
| w=0 |
при изменении частоты w от 0 до +µ.
| w®¥ |
| Im G (i w) |
| Re G (i w) |
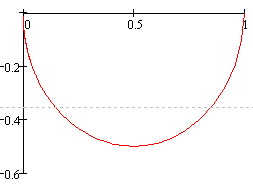
Рис. 2.5. Пример АФЧХ
4. Вещественная и мнимая частотные характеристики (ВЧХ и МЧХ)
Вещественная (ВЧХ) и мнимая (МЧХ) частотные характеристики представляют собой зависимости вещественной и мнимой части частотной передаточной функции от частоты.
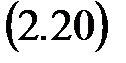 U (ω) = Re G (i ω), V (ω) = Im G (i ω)
U (ω) = Re G (i ω), V (ω) = Im G (i ω)
Пример.
| U, V |
| w |

Рис. 2.6. Пример ВЧХ и МЧХ

| U(w) |
| V(w) |
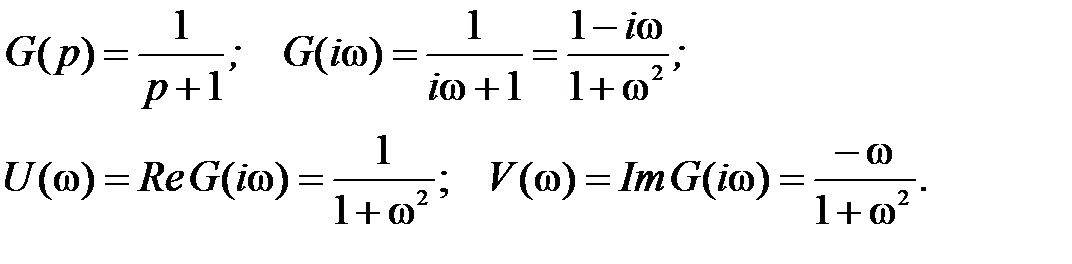
L (w) = 20 lg ½ G (i w)½,
где G (i w) – частотная передаточная функция.
ЛАХ измеряется в децибелах, строится в логарифмическом масштабе. Для построения ЛАХ по оси абсцисс откладывается частота w в логарифмическом масштабе, т. е. наносятся отметки, соответствующие lg w, а около отметок проставляется истинное значение частоты в 1/с. Ось ординат может пересекать ось абсцисс в любом месте; следует учесть, что точка w = 0 лежит на оси частот слева в бесконечности, так как lg 0 = –¥. Поэтому ось ординат проводят так, чтобы справа от нее можно было показать весь ход ЛАХ. Единица приращения логарифма частоты соответствует одной декаде, т. е. изменению в 10 раз. Поэтому по оси абсцисс расстояние между 1 и 10 такое же, как и между 10 и 100, 100 и 1000. Это позволяет подробно исследовать частотные характеристики в разных диапазонах (низких и высоких частот).
| w |
| L |
| L, дБ |
| w |
| 0,1 1 10 100 |

Рис. 2.7. Пример ЛАЧХ
6. Логарифмическая фазовая частотная характеристика (ЛФХ) представляет собой построенную в другом (логарифмическом) масштабе фазовую частотную характеристику. По оси ординат откладываются значения фазы j(w), а по оси абсцисс, как и для ЛАХ, – логарифм частоты.
| w |
| j |
| 0,1 1 10 10 |
| j |
| w |
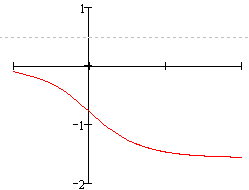
Рис. 2.8. Пример ЛФЧХ
Логарифмические частотные характеристики, как правило, применяются при анализе устойчивости методом Найквиста. В этом случае они строятся одна под другой, причем используются приближенные (асимптотические) ЛЧХ.
Экспериментальное определение частотных характеристик
Эксперимент по определению частотных характеристик проводят в следующей последовательности:
– на вход системы подают гармонический сигнал x (t) = a × sin w1 t; w1 – нижняя граница диапазона, в котором строятся характеристики;
– ждут окончания переходного процесса (установившийся режим);
– измеряют амплитуду b 1 выходного сигнала y (t) = b 1× sin w1(t +D t 1) и временной сдвиг D t 1 между выходным и входным сигналами;
– получают значение АЧХ A (w1) = b 1/ a при w = w1 и значение ФЧХ – j(w1) = w1×D t 1;
– изменяют значение частоты w2 = w1 + Dw; Dw – шаг построения характеристик и повторяют приведенные выше шаги;
– повторяют эксперимент с заданным шагом для всего интересующего интервала изменения частот.
Тест (на 15 мин)
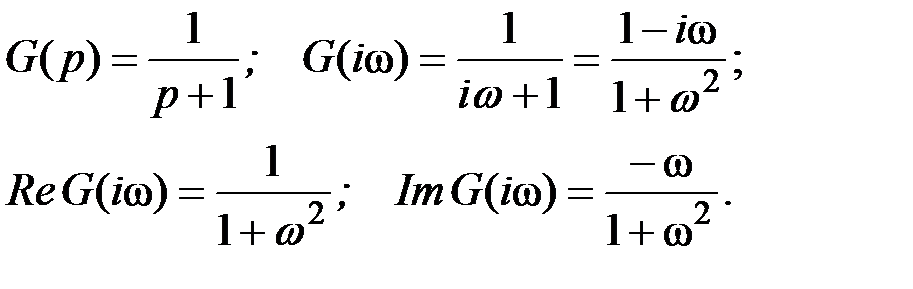
1. По ПФ звена G (p) = 1/(p +1) определите ФЧХ звена.
2. По ПФ звена G (p) = (p +1)/(p +2) постройте график АЧХ.
3. Нарисуйте АФЧХ звена с ПФ G (p) =1 /(2 p +3).
4. Нарисуйте ВЧХ и МЧХ звена с ПФ G (p) = 1/(p +2).
5. Нарисуйте ЛАХ и ЛФХ звена, заданного уравнением 
6. Звено задано дифференциальным уравнением  Запишите выражение для выходного сигнала y (t), если входной сигнал x (t) = 2 cos (3 t +p/4).
Запишите выражение для выходного сигнала y (t), если входной сигнал x (t) = 2 cos (3 t +p/4).
Поиск по сайту: