АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомДругоеЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция
Теорема Лурье
Рассмотрим нелинейную систему с одной однозначной нелинейностью z = Ф(e). Объединив вместе все остальные (линейные) звенья системы, представим ее в следующем виде (рис. 5.17):
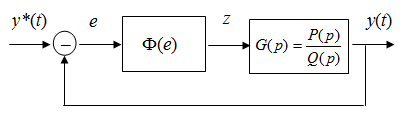
Рис. 5.17. Нелинейная система с обратной связью
Пусть статическая характеристика Ф(е) безынерционного нелинейного элемента удовлетворяет следующим условиям: однозначна и непрерывна; Ф(0) = 0; e ∙Ф(e) > 0, т. е. график характеристики проходит через начало координат и располагается в первом и третьем квадрантах. Для этого практически важного случая А. И. Лурье[2] и В. Н. Постников предложили следующую форму функции Ляпунова (квадратичная форма от е плюс интеграл от нелинейности):
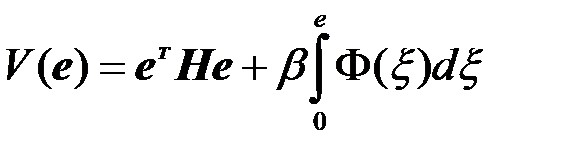 .
.
Пример.
Пусть линейная часть системы имеет передаточную функцию
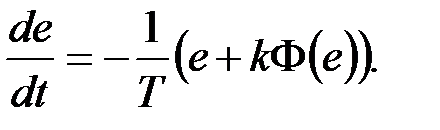
G (p) = k /(Tp + 1), а нелинейный элемент удовлетворяет приведенным условиям. При отсутствии воздействия (y* = 0) положению равновесия системы соответствует значение е = 0.
Дифференциальное уравнение системы первого порядка в форме Коши запишется так:
Выберем следующую функцию Ляпунова:
 .
.
Продифференцируем эту функцию по времени, получим:

Получили отрицательно-определенную функцию W (е), что позволяет сделать вывод об асимптотической устойчивости положения равновесия. Кроме того, замечаем, что функция  определена для всех е и при
определена для всех е и при 
 . Поэтому положение равновесия асимптотически устойчиво в целом. Наконец, обратим внимание на то, что полученный результат справедлив для целого класса нелинейных функций Ф(е), удовлетворяющих введенным выше ограничениям.
. Поэтому положение равновесия асимптотически устойчиво в целом. Наконец, обратим внимание на то, что полученный результат справедлив для целого класса нелинейных функций Ф(е), удовлетворяющих введенным выше ограничениям.
Таким образом, условия устойчивости не зависят от конкретного вида нелинейности и начальных условий. Устойчивость, не зависящая от начальных условий, называется устойчивостью в целом. Устойчивость, не зависящая от конкретного вида нелинейности, называется абсолютной устойчивостью.
Асимптотическую устойчивость в целом для класса нелинейностей называют абсолютной устойчивостью. В рассмотренном примере системы первого порядка положение равновесия абсолютно устойчиво.
Поиск по сайту: