АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомДругоеЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция
Линейная система в пространстве состояний
Метод пространства состояний был разработан в 60-70 годах XX в. американскими и советскими учеными. Сущность метода может быть резюмирована в следующих положениях:
- не используется преобразование Лапласа (анализ и синтез осуществляется непосредственно с использованием математического аппарата линейных дифференциальных уравнений);
- объект управления представляется в виде
где u – управляющее воздействие, x – вектор пространства состояний,
y – выход объекта управления (все переменные x, y, u могут быть векторными; матрицы A, B, C, D – постоянные матрицы соответствующих размерностей);
- постулируется, что для линейного объекта в пространстве состояний линейная пропорциональная обратная связь стабилизирует его динамику, т. е. асимптотически обращает в ноль производные вектора состояния,  ; другими словами, стабилизирующая обратная связь ищется в виде
; другими словами, стабилизирующая обратная связь ищется в виде  ,
,
где  – матрица постоянных коэффициентов;
– матрица постоянных коэффициентов;
- для решения задач синтеза и анализа систем используются численные и оптимизационные алгоритмы, реализованные программно, в т. ч. и в системе MATLAB.
Пример. Описание «грузика на пружинке в пространстве состояний
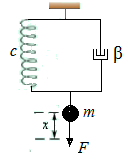
Рис. 2.9. Модель «грузика на пружинке»
Уравнение движения грузика на пружинке имеет вид
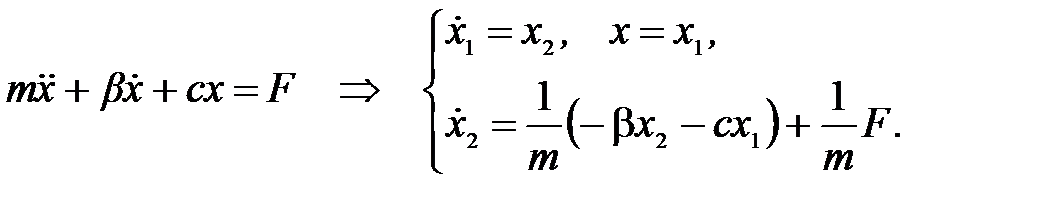
Как мы уже говорили ранее, переменные состояния могут быть выбраны по-разному: в нормальной, канонической и других формах. Этот выбор влияет на сложность исследования свойств системы. Рассмотрим этот вопрос подробнее на примере следующей САУ (рис. 2.10):

Рис. 2.10. Структурная схема САУ
Управляющее воздействие, которое прикладывается к управляемому объекту, определяется выражением
u (t) = G 0(p) e (t),
где e (t) – рассогласование на выходе чувствительного элемента.
Управляемая величина может быть найдена из выражения
y (t) = Gy/u (p) u (t) + Gy/f (p) f (t),
где f (t) – возмущающее воздействие.
Так как передаточные функции являются отношениями полиномов от р, т. е. Gy/u (p) = P (p)/ Q (p), Gy/f (p) = R (p)/ Q (p), то уравнение для определения выходной величины примет вид
Q (p) y (t) = P (p) u (t) + R (p) f (t).
В общем случае имеем дифференциальное уравнение n -го порядка.
Это уравнение n -го порядка можно представить в виде системы дифференциальных уравнений первого порядка

где введены n независимых переменных х 1, х 2, …, хn, называемых переменными состояния.
Эти уравнения, как и уравнение n -го порядка, полностью характеризуют состояния объекта в любой момент времени и называются уравнениями состояния. Связь между переменными состояния и управляемой величиной у устанавливается выражением
 y = с 1 x 1 + с 2 x 2 + … + сnxn.
y = с 1 x 1 + с 2 x 2 + … + сnxn.
Обычно уравнения состояния записывают в векторно-матричной форме


где A – матрица размером n ´ n, b, m, c – матрицы-столбцы.
Матрицу-столбец х называют вектором состояния, хотя в общем случае х не является вектором, так как его компоненты x 1, x 2, …, xn могут иметь неодинаковые размерности.
В выборе переменных состояния имеется определенная свобода. Важно только, чтобы они были независимыми. От того, как выбраны переменные, зависит форма уравнений состояния, т. е. вид входящих в них матриц.
При нормальной форме уравнений состояния в качестве переменных состояния выбираются сама управляемая величина y и n –1 ее производные:

Эту форму можно использовать лишь при отсутствии в правой части уравнения Q (p) y (t) = P (p) u (t) + R (p) f (t) производных от u и f, т. е. когда оно имеет вид


В этом случае
При нормальной форме записи y = x 1. Поэтому с Т = [1 0 … 0].
Достоинством нормальной формы является то, что переменные состояния имеют ясный физический смысл, а некоторые из них (например, х 1, х 2 и х 3) могут быть непосредственно измерены датчиками различных типов.
Для получения уравнений состояния в канонической форме уравнение объекта представляется в виде
Если корни p 1, p 2, …, pn полинома Q (p) действительные некратные, то правая часть этого уравнения может быть представлена в виде суммы элементарных дробей:

где α i и β i – коэффициенты разложения.
В качестве переменных состояния выбирают слагаемые этой суммы:
Отсюда (p – pi) xi = α iu + β if, i = 1, 2, …, n или

При этом
 y = x 1 + x 2 + … + xn.
y = x 1 + x 2 + … + xn.
Матрицы в уравнениях состояния принимают вид

Большое достоинство канонической формы – диагональность матрицы А, что существенно упрощает исследование. Основной недостаток состоит в том, что переменные состояния не имеют ясного физического смысла и не могут быть непосредственно измерены. Кроме нормальной и канонической формы существуют и другие способы выбора переменных состояния.
2.2 Элементарные звенья
Как уже говорилось выше, для представления отдельных элементов (звеньев) в ТАУ используется стандартная форма (рис. 2.11).
Рис. 2.11. Стандартная форма представления звена
x (t), y (t) – входной и выходной сигналы, G (p) – передаточная функция.
Существует некоторый набор простых, стандартных моделей, с помощью которого можно описать свойства различных сложных систем. Компоненты этого набора называются элементарными звеньями.
2.2.1 Безынерционное звено (статическое звено, идеальный усилитель)
Основные характеристики звена:
· передаточная функция G (p) = k, k – коэффициент усиления звена;
· уравнение звена y (t) = G (D) x (t) Þ y (t) = kx (t);
· переходная функция (реакция на единичный скачок) x (t) = 1[ t ] Þ h (t) = k× 1[ t ] (рис. 2.12, а);
· весовая функция (реакция на импульсное воздействие) x (t) = d(t) Þ g (t) = k× d(t) (рис. 2.12, б);
· амплитудно-частотная характеристика A (w) = k;
· логарифмическая амплитудно-частотная характеристика
L (w) = 20∙lg k (рис. 2.12, в);
· логарифмическая фазо-частотная характеристика j(w) = 0.

а б в
Рис. 2.12. Характеристики безынерционного звена: а – переходная функция, б – весовая функция, в – логарифмические частотные характеристики
Итак, для статического звена характерно то, что ПФ является константой, связь между входом и выходом – пропорциональная зависимость. Звено характеризуется единственным параметром – коэффициентом усиления k.
Примеры.
а) редуктор
j1(t) j2(t) M 1(t) M 2(t)
1/ i i
Модели разные в зависимости от того, что исследуется (и, соответственно, выступает в роли входа и выхода). Исследуем кинематику: j2(t) = 1/ i ×j1(t) (k = 1/ i), силовые характеристики: M 2(t) = i × M 1(t) (k = i). Но в обоих случаях модель статическая.
б) электрический усилитель
u 1(t) u 2(t)
k u 2(t) = k u 1(t); G (p) = k.
в) делитель напряжения
R 1
u вх R 2 u вых
Замечание. Элементарные звенья – это простейшие звенья, идеализированные модели реальных элементов. Их область применимости ограничена по полосе частот и амплитуде входного воздействия. Поясним сказанное на примере электрической цепочки.
Если u вх невелико, то справедлив закон Ома для участка цепи, т. е. линейная зависимость выходного сигнала (тока i через резистор) от входного (напряжения u вх): i = u вх/ R. При больших значениях u вх резистор сгорит и линейная зависимость нарушится. Следовательно, указанная зависимость (и соответствующая модель) справедлива лишь в некотором диапазоне входных воздействий. С другой стороны, при работе в области высоких частот (МГц) на процессы начнут влиять паразитные параметры (индуктивное сопротивление резистора). И в этом случае модель идеального усилителя непригодна для описания работы электрической цепочки. Аналогичная картина имеет место для усилителей напряжения (вид АЧХ на аппаратуре). В механике – при высоких скоростях происходит деформация зубьев, не проходит на выход высокочастотная составляющая.
2.2.2 Идеальный интегратор
Основные характеристики:
· передаточная функция G (p) = k/p; k – коэффициент усиления звена;
· уравнение звена y (t) = G (D) x (t) Þ Dy (t) = kx (t) (выходной сигнал является интегралом от входа), y ’ = kx (t), y = k∙ ò x (t) dt;
· переходная функция h (t) = kt (рис. 2.13, а);
· весовая функция g (t) = k (рис. 2.13, б);
· АЧХ A(w) = 1/w;
· ЛАЧХ L (w) = 20 lg k – 20 lg w (рис. 2.13, в);
· ФЧХ j(w) = – p/2.

а б в
Рис. 2.13. Характеристики идеального интегратора: а – переходная функция, б – весовая функция, в – логарифмические частотные характеристики
Описание идеального интегратора в пространстве состояний:
Пример. Гидродвигатель (рис. 2.14)
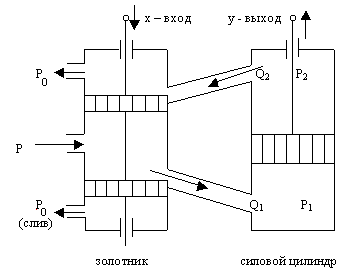
Рис. 2.14. К математической модели гидродвигателя
Силовой гидропривод предназначен для усиления мощности сигналов. Вход – перемещение x золотника, выход – перемещение y силового цилиндра. Модель включает следующие соотношения:
· выражение для объемного расхода жидкости Q = S (x)m v, где S (x) – площадь открытого окна золотника; v – скорость движения жидкости; m – коэффициент, учитывающий потери.
· выражение для скоростного напора D p = r v 2/2, где D p – перепад давлений;
r – плотность жидкости.
· условие неразрывности потока (“сколько втекает, столько вытекает”):
Q 1 = Q 2 = Fy ’, где F – площадь поршня.
· уравнение движения поршня my ’’= P 1 F – P 2 F, где m – масса поршня. Не учитывая инерционных свойств, имеем (m = 0): P 1 = P 2.

Будем считать, что при x = 0 окно золотника полностью закрыто. Тогда S (x) @ b D x, где b – ширина окна, D x – смещение золотника относительно указанного положения отсчета. В результате
 .
.
Итак, скорость движения поршня рабочего цилиндра пропорциональна перемещению золотника.
Другие примеры интегрирующих звеньев – электродвигатель, резервуар, заполняемый водой.
2.2.3 Идеальное дифференцирующее звено
Основные характеристики:
· передаточная функция G (p) = k×p; k – коэффициент усиления звена;
· уравнение звена y (t) = G (D) x (t) Þ y (t) = k×dx (t)/ dt – (выход пропорционален скорости изменения входа);
· переходная функция h (t) = k ×d[ t ];
· весовая функция g (t) = k ×d'(t). L +20 дБ/дек
· амплитудно-частотная A (w) = w
· ЛАЧХ L (w) = 20 lg w; j w
· ФЧХ j(w) = π/2. π/2
w
Пример. Тахогенератор - электрическая машина, вал которой соединяют непосредственно или через редуктор с валом нагрузки, когда хотят определить скорость его вращения. На клеммах ТГ возникает напряжение пропорциональное скорости вращения вала: u тг = k тг × d j/ dt.
2.2.4 Инерционное (апериодическое) звено
Характеристики апериодического звена:
· передаточная функция G (p) = 1/(Tp +1), T – постоянная времени;
· уравнение звена y (t) = G (D) x (t) Þ 
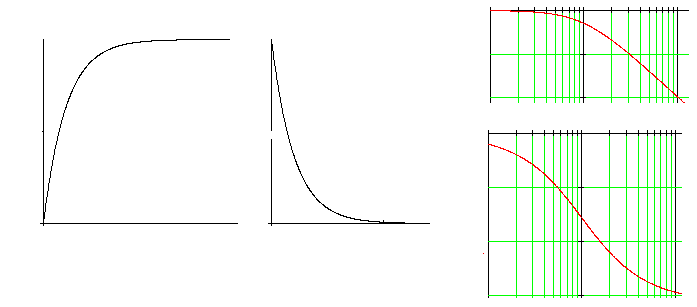
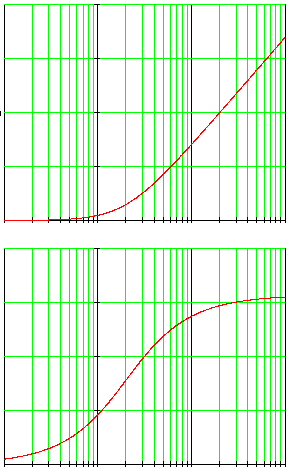
· переходная функция h (t) = 1 – e -t/T (рис. 2.15, а);
· весовая функция g (t) = 1/ T ×e -t/T (рис. 2.15, б);
· амплитудно-частотная A (w) = 
· ЛЧХ L (w) = –10 lg (1+ T 2w2) (рис. 2.15, в);
· асимптотическая ЛАЧХ 
·
| L |
| g |
| j |
| w |
| w |
| t |
| t |
| а |
| б |
| h |
в
Рис. 2.15. Характеристики апериодического звена: а – переходная функция, б – весовая функция, в – логарифмические частотные характеристики
Пример. Гидроусилитель (рис. 2.16)
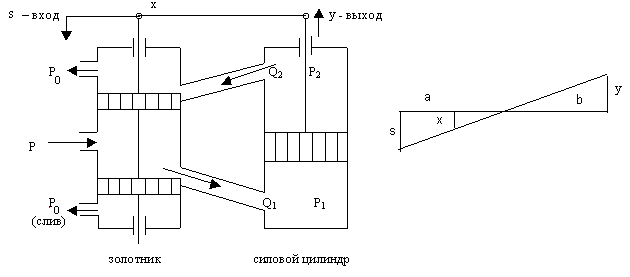
Рис. 2.16. К математической модели гидроусилителя
Математическая модель:
Пример. Электропривод с нагрузкой

2.2.5 Колебательное звено
Характеристики колебательного звена:
· передаточная функция G (p) = 1/(T 2 p 2+2 T x p +1), T – постоянная времени,
ξ – относительное демпфирование, 0 < ξ < 1;
· уравнение звена y (t) = G (D) x (t) Þ 
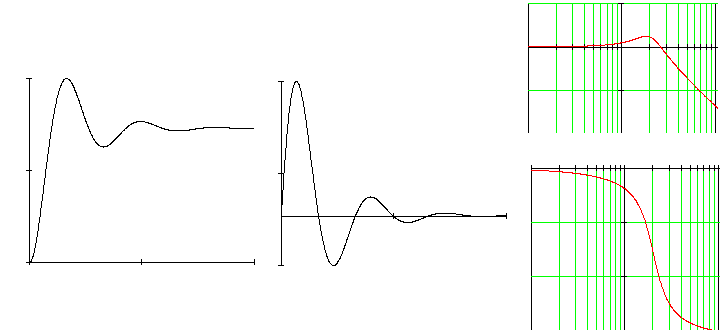
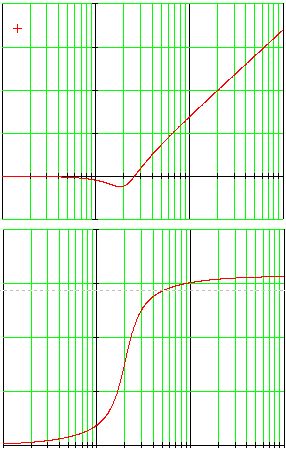
· переходная функция  (рис. 2.17, а);
(рис. 2.17, а);
· весовая функция g (t) =  (рис. 2.17, б);
(рис. 2.17, б);
· амплитудно-частотная A (w) = 
ЛЧХ L (w) =  (рис. 2.17, в);
(рис. 2.17, в);
· асимптотическая ЛАЧХ 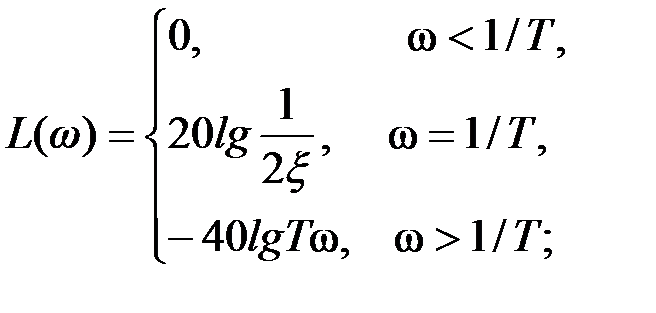
· ФЧХ j(w) = – arctg [2 Tx w/(1– T 2w2)].
Примеры (груз на пружине, колебательный контур).
| g |
| h |
| w |
| w |
| t |
| t |
| j |
| L |
| б |
| a |
| 1/ T |
| 1/ T |
в
Рис. 2.17. Характеристики колебательного звена: а – переходная функция,
б – весовая функция, в – логарифмические частотные характеристики
2.2.6 Другие элементарные звенья
– Консервативное звено G (p) = 1/(T 2 p 2+1);
– Дифференцирующее (форсирующее) звено 1-го порядка
G (p) = Tp +1;
– Дифференцирующее звено 2 - го порядка G (p) = T 2 p 2+2 T x p +1.
Логарифмические частотные характеристики дифференцирующих звеньев 1-го и 2-го порядков получаются зеркальным отображением относительно оси абсцисс соответствующих им инверсных звеньев: апериодического и колебательного (рис. 2.18, а).
Реальные элементы (системы) представляют собой соединение элементарных звеньев. Например, двигатель–редуктор (усилитель, идеальный интегратор, апериодическое звено). Примеры: апериодическое звено 2-го порядка G (p) = k /(T 1 p +1)(T 2 p +1), интегрирующее звено с замедлением G (p) = k/p (Tp +1), изодромное звено G (p) = k (Tp +1)/ p, дифференцирующее звено с замедлением
G (p) = kp /(Tp +1).
| L |
| j |
| w |
| w |
| w |
| w |
| L |
| j |
а б
Рис. 2.18. Логарифмические частотные характеристики дифференцирующего (форсирующего) звена:
а – 1-го порядка, б – 2-го порядка
2.2.7 Неустойчивые (неминимально-фазовые) звенья
Рассмотренные звенья позиционного типа (безынерционное, апериодическое, колебательное) относятся к устойчивым звеньям, или к звеньям с самовыравниванием, т. е. приходят к новому установившемуся значению при ограниченном изменении входной величины или возмущающего воздействия (термин «самовыравнивание» обычно применяется для звеньев, представляющих собой объекты регулирования).
Существуют звенья, у которых ограниченное изменение входной величины или возмущающего воздействия не вызывает прихода звена к новому установившемуся состоянию, а выходная величина имеет тенденцию неограниченного возрастания во времени. К таким звеньям относятся, например, звенья интегрирующего типа.
У некоторых звеньев этот процесс выражен еще заметнее, выходной сигнал возрастает во времени по экспоненте. Такие звенья имеют в характеристическом уравнении положительные вещественные корни или комплексные корни с положительной вещественной частью. Они относятся к категории неустойчивых или неминимально-фазовых звеньев. У неминимально-фазовых звеньев имеются отрицательные коэффициенты в знаменателе передаточной функции.
Рассмотрим в качестве примера звено, описываемое дифференциальным уравнением Tdy/dt – y = kx, которому соответствует передаточная функция G (p) = k /(Tp –1). Пример – двигатель любого типа, если его механическая характеристика, т. е. зависимость вращающего момента от скорости вращения М = f (w), имеет положительный наклон. Переходная функция такого звена представляет собой показательную функцию с положительным показателем степени: h (t) = k (et/T –1)×1[ t ].
Частотные характеристики неминимально-фазовых звеньев
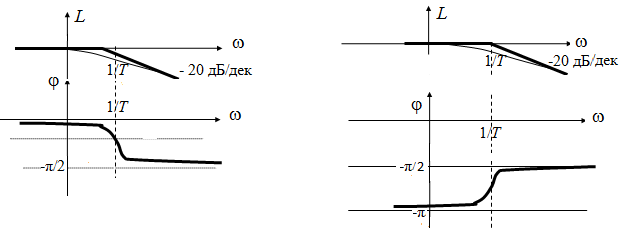
Амплитудные характеристики неминимально-фазовых звеньев совпадают с амплитудными характеристиками соответствующих устойчивых звеньев, а фазовые характеристики отличаются (меньше по величине) фазовых характеристик соответствующих минимально-фазовых.
Сравним для примера логарифмические частотные характеристики апериодического звена (рис. 2.19, а) и его неминимально-фазового аналога (рис. 2.19, б).
а б
Рис. 2.19. Логарифмические частотные характеристики устойчивого (а) и неустойчивого (б) апериодического звена
Для звена с ПФ G (p) = 1/(Tp + 1)
A (w) = 1/Ö1+ T 2w2, L (w) = 20 lg (1/Ö1+ T 2w2), j(w) = – arctg (w T).
Для звена с ПФ G (p) = 1/(Tp - 1)
A (w) = 1/Ö1+ T 2w2, L (w) = 20 lg (1/Ö1+ T 2w2), j(w) = –p + arctg (w T).
Тест (на 10 мин)
1. На вход интегрирующего звена подается сигнал x (t) = t +1. Каким будет сигнал на выходе звена?
2. На вход звена с передаточной функцией G (p) = p +1 подан сигнал x (t) = t. Нарисуйте график изменения выхода y (t).
3. Опишите в пространстве состояний звено с передаточной функцией Gy/u (p) = k /(Tp +1).
4. По дифференциальному уравнению звена  определите передаточную функцию Gy/х (p).
определите передаточную функцию Gy/х (p).
5. Определите амплитудно-частотную характеристику звена, заданного дифференциальным уравнением  .
.
Поиск по сайту: