АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомДругоеЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция
Синтез систем управления методом логарифмических частотных характеристик
Одним из основных, наиболее часто используемых методов синтеза линейных систем является метод, основанный на использовании асимптотических логарифмических частотных характеристик разомкнутой системы. С одной стороны, свойства системы автоматического управления полностью определяются частотными характеристиками ее разомкнутого контура, с другой стороны, эти характеристики легко строятся.
Этот метод может быть применен даже тогда, когда неизвестны передаточные функции отдельных элементов. В этом случае используются экспериментально снятые частотные характеристики указанных элементов или разомкнутой системы в целом.
Исходными данными при проектировании являются передаточная функция G (p) объекта без регулятора (располагаемой системы) или экспериментально снятые частотные характеристики объекта и желаемые требования к объекту:
- коэффициенты ошибок регулирования по положению, скорости и производным высших порядков;
- время переходного процесса t пп;
- перерегулирование s;
- запасы устойчивости по амплитуде D A и фазе Dj.
Методика синтеза последовательного регулятора по логарифмическим частотным характеристикам включает в себя следующие этапы:
· построение асимптотических ЛЧХ располагаемой системы;
· построение асимптотических ЛЧХ желаемой разомкнутой системы (рис. 3.8);
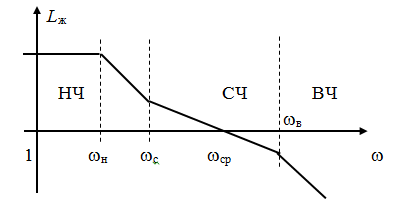
Рис. 3.8. Желаемая ЛАХ
· определение асимптотических ЛЧХ регулятора;
· построение передаточной функции регулятора;
· построение переходной характеристики синтезированной замкнутой системы;
· проверка соответствия полученной системы заданным требованиям;
· техническая реализация регулятора.
Блок-схема алгоритма синтеза представлена на рис. 3.9.
начало
G (p) D A, Dj,
s, t пп, ci …
L р(w)= L ж(w)– L (w)
jр(w)=jж(w)–j(w)
R (p)
h (t), L (w)
св-ва достигнуты?
техническая реализация
регулятора
конец
Рис. 3.9. Блок-схема алгоритма синтеза регулятора методом ЛАХ
Методика синтеза последовательного регулятора основана на соотношениях


в которых индекс «ж» обозначает желаемые передаточную функцию и частотные характеристики разомкнутого контура, и на зависимости свойств замкнутой системы от характеристик разомкнутой.
Характеристики регулятора получают путем графического вычитания
 L р(w) = L ж(w) – L (w), jр(w) = jж(w) – j(w).
L р(w) = L ж(w) – L (w), jр(w) = jж(w) – j(w).
Передаточную функцию регулятора R (p) восстанавливают по его частотным характеристикам.
На первом этапе строятся асимптотические логарифмические частотные характеристики L (w) и j(w), соответствующие передаточной функции G (p) разомкнутой системы (располагаемой, без регулятора). Построение может быть выполнено теоретическими методами на основе математической модели или экспериментально.
Наиболее сложным является второй этап формализации желаемых свойств замкнутой системы в форме желаемых логарифмических частотных характеристик L ж(w) и jж(w) разомкнутой системы. Их формирование выполняется по-разному в разных частотных диапазонах.
Низкочастотная часть желаемой амплитудной характеристики в интервале частот 0 £w £ wн должна иметь наклон 0 или –20∙ m дБ/дек, где m – требуемая степень астатизма системы, и отсекать на оси L желаемое значение Lж (1), определяемое по общему коэффициенту усиления желаемой разомкнутой системы. Подробнее об определении этого коэффициента, а также других параметров желаемой характеристики речь идет ниже.
Среднечастотная часть желаемой амплитудной характеристики в интервале частот wс £ w £ wв должна иметь наклон –20 дБ/дек (или в отдельных случаях –40 дБ/дек) и пересекать ось w на желаемой частоте среза wср.
Низко- и среднечастотная части амплитудно-частотной характеристики соединяются в интервале частот wн < w < wс сопрягающей частью c наклоном –40 дБ/дек или –60 дБ/дек.
Высокочастотная часть желаемой амплитудной характеристики при w > wв должна иметь отрицательный наклон от –40 дБ/дек и более, так как она предназначена для максимального ослабления влияния высокочастотных шумов на работу системы управления (а для этого должна быстро убывать по величине с увеличением частоты).
При формировании желаемой амплитудно-частотной характеристики необходимо стремиться максимально совмещать частоты сопряжения асимптотических характеристик L (w) и L ж(w), чтобы упростить структуру регулятора, исключив лишние типовые звенья в его передаточной функции R (p) = G ж(p)/ G (p).
 На третьем этапе графическим вычитанием
На третьем этапе графическим вычитанием
L р(w) = L ж(w) – L (w), jр(w) = jж(w) – j(w)
определяются логарифмические характеристики последовательного регулятора. Эта операция выполняется достаточно просто, так как на отдельных участках сводится к вычитанию углов наклона прямых, кратных 20 дБ/дек.
По этим характеристикам на четвертом этапе восстанавливаются типовые звенья и передаточная функция регулятора R (p) по следующей методике:
· начальному низкочастотному участку характеристики L р(w) с наклоном асимптоты ±20 m 0 дБ/дек соответствует начальное типовое звено с передаточной функцией  Коэффициент усиления
Коэффициент усиления  определяем по координате L р(1), отсекаемой на оси L низкочастотной асимптотой графика L р(w) или ее продолжением;
определяем по координате L р(1), отсекаемой на оси L низкочастотной асимптотой графика L р(w) или ее продолжением;
· двигаясь слева направо по оси w, фиксируем частоты сопряжения w i асимптотической амплитудной характеристики L р(w). Каждому изменению ее наклона на ±20 дБ/дек соответствует типовое звено регулятора с передаточной функцией


(символ Å означает знак «+» для минимально-фазовых звеньев и знак «–» – для неминимально-фазовых).
· составляем из типовых звеньев Ri (p) передаточную функцию регулятора


На пятом этапе проектирования регулятора получают фактические показатели качества замкнутой системы путем вычисления ее передаточной функции G ж(p) и построения переходной характеристики

На шестом этапе статические и динамические свойства переходной характеристики сравниваются с желаемыми.
Если в процессе проектирования желаемые свойства замкнутой системы достигнуты, то на седьмом этапе выполняется техническая реализация полученной передаточной функции регулятора:
• последовательный регулятор преобразуется к желаемому типу или к комбинации регуляторов разных типов;
• разрабатывается техническое устройство, реализующее регулятор в требуемой элементной базе.
Если требуемые свойства замкнутой системы не достигнуты, желаемые логарифмические частотные характеристики корректируются, а цикл проектирования повторяется со второго этапа.
Главные достоинства расчета регулятора методом логарифмических частотных характеристик заключаются в использовании кусочно-линейных асимптотических характеристик, которые легко и быстро строятся по передаточной функции и так же быстро позволяют восстановить передаточную функцию по логарифмическим характеристикам. Применение номограмм позволяет исключить решение нелинейных уравнений для определения параметров желаемой ЛАХ.
Пример. Для объекта с передаточной функцией

рассчитать последовательный регулятор, дающий замкнутой системе астатизм первого порядка с предельной ошибкой отработки заданного линейного сигнала, не превышающей 10 % скорости его изменения, показателями качества t пп £ 2 с, s £ 20 % и запасами устойчивости
D А ³ 6 дБ и Dj ³ p/4.
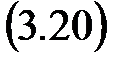
Решение. Сначала строим асимптотические логарифмические характеристики объекта L (w) и j(w) (рис. 3.10). Затем сформируем желаемую ЛАХ (L ж).
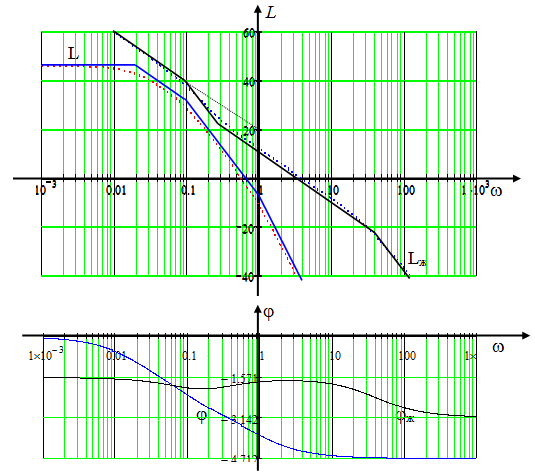
Рис. 3.10. Логарифмические частотные характеристики
· Начальный участок желаемой асимптотической ЛАХ имеет наклон –20 дБ/дек, так как система должна быть астатической.
· Установившаяся ошибка отработки линейного сигнала x (t) = x 0 + vt равна e уст(t) = c 0(x 0 + vt) + c 1 v. Так как система астатическая, то c 0 = 0. Из условия e уст(t) £ 0,1 v следует e уст(t) = c 1 v £ 0,1 v Þ c 1 £ 0,1. Отсюда получаем требование на выбор общего коэффициента усиления разомкнутой системы
c 1 = 1/ К Þ К = 1/ c 1 ³ 10 Þ L ж(1) ³ 20 дБ.
· Влево от точки (1, 20) проводим пунктиром низкочастотную асимптоту амплитудной характеристики с наклоном –20 дБ/дек.
· Частота среза wср выбирается по заданным показателям качества переходного процесса t пп и s с помощью номограмм t ппwср(Рmах / Р 0) и s(Рmах / Р 0), (рис. 3.11).
| t пwср |
| Dj |
Рис. 3.11 – Номограммы для определения характеристик
Рmах и Р 0 – максимальное и начальное значения вещественной частотной характеристики замкнутой системы Р з(w) = Re G з(i w), задающие аргумент Рmах / Р 0, имеющий вспомогательный характер.
Последовательность применения номограмм показана стрелками:
• по желаемому перерегулированию s(%) находим аргумент Рmах / Р 0 и соответствующее ему произведение t пwср времени переходного процесса t п на частоту среза wср;
• деля это произведение на желаемое время переходного процесса t пп (с), получим частоту среза wср;
• по номограммам Dj(Рmах / Р 0) и L с, L в(Рmах / Р 0) оцениваются запас устойчивости по фазе Dj (запас по амплитуде полагается равным 6 дБ) и минимальные значения краевых амплитуд L с = L ж(wс) и
L в = L ж(wв). Из соотношений

можно определить границы среднечастотного диапазона:
 .
.
· По номограммам для s = 20% определяем произведение
t ппwср »2,5p»8, а по нему частоту среза wср = 2,5p/ t пп» 4 1/с.
· Через точку (wср, 0) проводим среднечастотную асимптоту также с наклоном –20 дБ/дек. По номограмме определяем минимальные значения амплитуд L с = L в » 16 дБ и границы среднечастотного диапазона:

· Так как низкочастотная и среднечастотная части Lж (w) не пересекаются, то нужна сопрягающая часть с наклоном –40 дБ/дек. Чтобы выражение для передаточной функции регулятора (а значит и сам регулятор) было проще, следует, по возможности, совмещать сопрягающие частоты желаемой ЛАХ с сопрягающими частотами ЛАХ объекта. Поэтому совместим левую границу wн характеристики L ж(w) с частотой сопряжения асимптоты амплитудной характеристики объекта w2 = 0,1 1/с. Тогда сопрягающая и среднечастотная асимптоты пересекутся на частоте wc = 0,25 1/с Þ Т c = 4 с, что удовлетворяет условию на wc.
· Выберем частоту wв = 40 1/с > 30 1/с сопряжения среднечастотной и высокочастотной асимптот желаемой амплитудной характеристики Lж (w), откуда Т в = 0, 025 с.
· По асимптотическим характеристикам Lж (w), j ж (w) восстановим передаточную функцию желаемого разомкнутого контура

· Рассчитаем реальные показатели качества полученной замкнутой системы по переходной характеристике

Эта характеристика имеет апериодический характер, перерегулирование s = 2,8% < 20%, быстродействие t пп = 0,6 с < 2 с и нулевую статическую ошибку eуст = 0 (рис. 3.12).
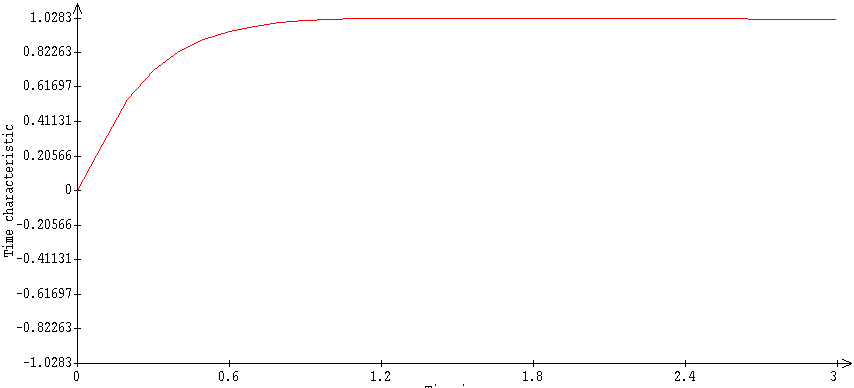
Рис. 3.12. Переходная характеристика желаемой системы
По логарифмическим частотным характеристикам желаемого разомкнутого контура определяем запас устойчивости по фазе
Dj > p/4.
Желаемые свойства замкнутой системы достигнуты. Вычисляем коэффициент статического усиления K p = K ж /K = 0,05 и передаточную функцию последовательного регулятора
 Теперь можно сконструировать принципиальную схему корректирующего устройства на операционных усилителях (рис. 3.13).
Теперь можно сконструировать принципиальную схему корректирующего устройства на операционных усилителях (рис. 3.13).



Рис. 3.13. Принципиальная схема корректирующего устройства
Для первого усилителя:

Для второго усилителя:

Для третьего усилителя:


Поиск по сайту: